基于激光測距的盲區(qū)檢測雷達(dá)設(shè)計
1 激光測距應(yīng)用介紹
激光測距傳感器是一種利用激光技術(shù)進(jìn)行距離測量的傳感器��,根據(jù)其工作原理和應(yīng)用場景不同����,可以分為多種類型����,以下是其中常見的幾種:
時間差法激光測距傳感器:該傳感器通過發(fā)射激光脈沖�����,當(dāng)激光脈沖照射到目標(biāo)物體上時���,返回的反射光經(jīng)過接收器接收�����,并測量其時間差來計算距離�����。時間差法激光測距傳感器適用于測量較短距離范圍內(nèi)的距離��,通常精度較高[2]�。
相移法激光測距傳感器:該傳感器采用的是激光干涉測量原理�����,將激光分為兩束����,一束經(jīng)過參考光路,另一束經(jīng)過目標(biāo)物體后返回接收器�����。將兩束激光疊加����,通過相位差來計算目標(biāo)物體的距離����。相移法激光測距傳感器通常適用于需要高精度測量的場景�����。
波前法激光測距傳感器:該傳感器通過測量激光波前形態(tài)的變化來計算目標(biāo)物體的距離����。其采用的是自適應(yīng)光學(xué)技術(shù),能夠自動調(diào)整激光波前形態(tài)����,適應(yīng)不同距離和目標(biāo)物體的形態(tài),具有高精度和廣泛的應(yīng)用范圍���。
相位測量法激光測距傳感器:該傳感器通過測量激光信號的相位變化來計算目標(biāo)物體的距離��。相位測量法激光測距傳感器通常精度高��,但測量范圍較窄�,適用于測量較短距離的場景����。
除了以上常見的幾種激光測距傳感器�,還有一些其他類型的傳感器����,如三角測量法激光測距傳感器、多目標(biāo)激光測距傳感器等�,而我們的車輛盲區(qū)檢測基本上就是進(jìn)行車輛周邊工況檢測����,因此我們使用時間差法激光測距傳感器。
2 系統(tǒng)方案設(shè)計
本系統(tǒng)的主要功能是為了檢測大貨車盲區(qū)內(nèi)是否有其他物品���,在停車和低速時進(jìn)行安全預(yù)警�,提醒司機(jī)盲區(qū)內(nèi)存在異物��,防止安全事故發(fā)生����;本系統(tǒng)基于VL53L1傳感器設(shè)計了一套盲區(qū)檢測系統(tǒng)。該傳感器測量傳感器與周圍物體之間的距離����,從而讓系統(tǒng)能檢測到貨車盲區(qū)內(nèi)的潛在危險�。該系統(tǒng)包括可視化顯示和聲音警報�����,以提示駕駛員注意潛在的危險����。
本系統(tǒng)采用低成本處理器ESP32, 其擁有80~160 MHz 的主頻速率使得處理器可以輕松處理外圍傳感器數(shù)據(jù)����,同時它支持多種低功耗模式,例如Deep Sleep�、Modem Sleep 等。Deep Sleep 模式可以使芯片功耗降低到最低���,當(dāng)芯片處于Deep Sleep 狀態(tài)時�����,整個芯片會進(jìn)入低功耗模式�����,只有RTC 計時器和一些GPIO 保持喚醒狀態(tài)���。在Deep Sleep 模式下����,ESP32 可以達(dá)到幾微安的功耗�����,能夠延長電池壽命�,從而實現(xiàn)長期低功耗運行。
除了低功耗���,ESP32 還具備豐富的外設(shè)接口,包括GPIO��、SPI��、UART�����、PWM等�����。GPIO 可以通過軟件控制,實現(xiàn)各種功能����,例如控制LED 燈、讀取傳感器數(shù)據(jù)等��。SPI 接口可以連接外部存儲器或其他外設(shè)�,實現(xiàn)數(shù)據(jù)存儲或傳輸?shù)裙δ堋ART 接口可以連接串口設(shè)備�,例如電腦或其他微控制器,實現(xiàn)數(shù)據(jù)通信�����。PWM 接口可以產(chǎn)生PWM 信號��,用于控制舵機(jī)���、電機(jī)等����。此外�,ESP32 還支持ADC、I2C、SDIO 等其他接口����,可以滿足不同應(yīng)用的需求。
VL53L1X 是一種激光測距傳感器����,采用時間差法進(jìn)行距離測量,是一種時間飛行(TOF)傳感器��。它使用紅外激光器發(fā)射激光脈沖�����,測量反射激光脈沖的時間差��,從而計算出目標(biāo)物體與傳感器之間的距離[3]��。VL53L1 具有高精度�、小尺寸����、低功耗等特點,在許多應(yīng)用中都有廣泛的應(yīng)用�,例如自動駕駛、智能家居��、機(jī)器人導(dǎo)航等。芯片內(nèi)部集成了激光發(fā)射器和SPAD 紅外接收器�����,采用了第二代FightSenseTM 技術(shù)��,通過接收器所接收到的光子時間來計算距離����,最遠(yuǎn)測量距離可達(dá)4 m,適合中短距離測量的應(yīng)用[4-8]����。
系統(tǒng)使用4.3 英寸LCD 液晶屏作為系統(tǒng)顯示模組,同時配備高亮LED 及蜂鳴器做聲光提升���,根據(jù)不同距離及危險程度進(jìn)行警告和提示�。
2 硬件系統(tǒng)設(shè)計
系統(tǒng)在硬件設(shè)計上較為簡單�,由于原傳感器采用的IIC 協(xié)議通訊速率較高,通信距離較近�����,在應(yīng)用中大多都應(yīng)用于板間通信,無法進(jìn)行長距離通信����,因此系統(tǒng)設(shè)計上利用ESP32 的WiFi 組網(wǎng)功能,實現(xiàn)無線節(jié)點網(wǎng)絡(luò)間的數(shù)據(jù)傳輸[9-12]�,各節(jié)點單獨使用1 個處理器進(jìn)行數(shù)據(jù)處理、掉線檢測等功能�����。
3 嵌軟設(shè)計及外設(shè)通信
對嵌入式軟件設(shè)計整體思路是通過ESP32 的WIFI組網(wǎng)功能���,將節(jié)點數(shù)據(jù)進(jìn)行匯總發(fā)送到主機(jī)��,根據(jù)閾值空間不同進(jìn)行相應(yīng)報警���,同時與常規(guī)倒車?yán)走_(dá)類似,將距離數(shù)據(jù)渲染到TFT 屏幕�����;此外各傳感器節(jié)點通過相應(yīng)協(xié)議讀取傳感器數(shù)據(jù)�����,考慮到傳感器數(shù)據(jù)的穩(wěn)定性問題���,將傳感器數(shù)據(jù)進(jìn)行濾波處理�����,保證數(shù)據(jù)的準(zhǔn)確性后才將數(shù)據(jù)發(fā)給主機(jī)���。
數(shù)據(jù)匯總時使用UDP 協(xié)議發(fā)送數(shù)據(jù),相應(yīng)上報數(shù)據(jù)協(xié)議如圖4 所示���。在整個嵌入式系統(tǒng)的設(shè)計過程中�,我們還考慮了系統(tǒng)的低功耗和實時性問題��,通過合理的系統(tǒng)設(shè)計和代碼實現(xiàn)�����,達(dá)到了系統(tǒng)低功耗和高實時性的目標(biāo)�。
4 系統(tǒng)測試及結(jié)語
在針對于大型貨車的應(yīng)用中,主要是對行人���、車輛等物品進(jìn)行檢測����,在貨車盲區(qū)安裝傳感器節(jié)點后進(jìn)行測試,每組測試100 次��,進(jìn)行10 次測試���,測試結(jié)果如圖1�。
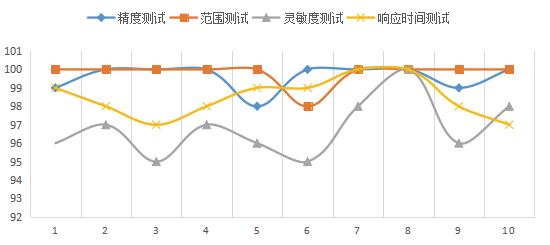
1)靈敏度測試:測試系統(tǒng)是否能夠正確地檢測到障礙物并發(fā)出警報���。通過放置障礙物在車輛后方和側(cè)方不同位置進(jìn)行測試����;
2)范圍測試:測試系統(tǒng)的檢測范圍是否符合要求�。可以通過將障礙物放置在系統(tǒng)檢測范圍的邊緣進(jìn)行測試�;
3)精度測試:測試系統(tǒng)的檢測距離和位置是否準(zhǔn)確,檢測誤差是否在3% 以內(nèi)����;
4)響應(yīng)時間測試:測試系統(tǒng)的響應(yīng)時間是否符合要求。在25 次采樣濾波周期內(nèi)(即0.5 s)發(fā)出警告提醒�����。
參考文獻(xiàn):
[1] 交宣.創(chuàng)新管理措施,防范大貨車右轉(zhuǎn)盲區(qū)致禍[J].道路交通管理,2021,No.446(10):14-16
[2] 任晶秋,鐘攀,張琳,等.人體紅外測溫槍的溫度測量補(bǔ)償研究[J].電子測量技術(shù), 2021
[3] 石向榮.基于VL53L0X的激光避障傳感器設(shè)計[J].福建質(zhì)量管理, 2019(13)
[4] 何立仁,王義.無觸點開關(guān)控制的汽車CAN總線燈光系統(tǒng)(英文)[J].測試科學(xué)與儀器:英文版, 2014, 5(1):5.
[5] 彭為強(qiáng).復(fù)雜環(huán)境下基于雙激光雷達(dá)融合的感知系統(tǒng)研究[D].上海:上海師范大學(xué),2022.
[6] 張一鳴.超聲波測距盲區(qū)研究的探討[J].電腦知識與技術(shù),2020,16(12):256-258.
[7] 程珩,李瑾,靳寶全.基于無源自振抑制的小盲區(qū)超聲測距方法[J].振動測試與診斷,2015,35(2):369-374+404.
[8] 凌超.汽車側(cè)面盲區(qū)防撞預(yù)警系統(tǒng)的設(shè)計與實現(xiàn)[D].上海:復(fù)旦大學(xué),2013.
[9] 倪陽旦,盧東祁,喻謙,等.基于ESP-Mesh網(wǎng)絡(luò)的變電站物聯(lián)信息匯聚[J].上海交通大學(xué)學(xué)報,2021,55(S2):60-63.
[10] 關(guān)世友,吳再群,劉曉輝.一種物聯(lián)網(wǎng)節(jié)點自組網(wǎng)方案設(shè)計與實現(xiàn)[J].長江信息通信,2021,34(09):116-118+122.
[11] 令曉靜.敏捷.分布式WiFi技術(shù)研究及應(yīng)用[J].中國新通信,2021,23(20):66-67.
[12] 唐雨.基于WIFI無線傳感網(wǎng)的結(jié)構(gòu)應(yīng)變同步測量方法研究[D].武漢:武漢理工大學(xué),2021.
(本文來源于《電子產(chǎn)品世界》雜志2023年6月期)


.png)





